

Googleの「自動運転カー」が未だ実現には「ほど遠い」いくつかの理由
あらゆる自動車からドライバーを省略することを目的としているGoogleの「自動運転カー」ですが、語られる未来とは裏腹に、まだまだ実現には「ほど遠い」ものがあります。一体何が足りていないのでしょうか。
こちらがGoogleが開発を進めている「自動運転カー」。既存の車体に対人・対物レーダーやレーザー測距センサー、通信機器、コントロールデバイス等を搭載したものです。
ファイル:Google’s Lexus RX 450h Self-Driving Car.jpg – Wikipedia

これだけを見ると実現はもうすぐそこ、と思ってしまうのですが、実際のところは未完成もいいところの技術なのです。
そもそもGoogleの「自動運転カー」に搭載されているコンピューター類はセンサーで受け取った情報を処理しているだけで「どの道をどう走ればいいのか」が外部で算出した結果をダウンロードしています。簡単にいうと自動運転カーは見えないレールの上を走っているだけです。
この「レール」に相当するのが、Googleマップのデータです。Googleは世界中のありとあらゆる場所にストリートビューカーを走らせてデータを収集し、無料でものすごい地図や現地の画像、建物の3Dデータまで公開してくれているのですが、あれはボランティアでやっているのではなく、すべてはこの自動運転カーを実現させるための手段でしかありません。スマートフォンのカメラで得たデータから周囲の3Dマップを作り出す「Project Tango」も、この手段の一貫なのでしょう。
こうして得られた道路と周辺の画像データや3Dマップを「レール」にし、これとセンサーで計測した実際の環境がぴったりと合うように、かつ他の車や歩行者と当たらないように車を動かすのが「自動運転カー」なのです。
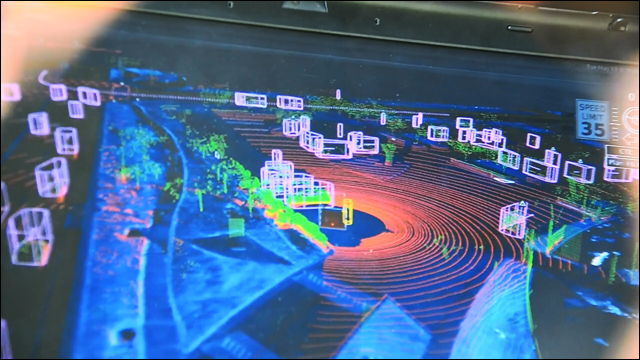
実際の自動運転カーのコントロールソフトウェアが周囲の環境を認識している様子。
Google Self-Driving Car Software on Vimeo
そういうわけなので「Googleマップに十分なデータが収録されていない場所」は当然走ることができません。建築工事、道路の付け替え、災害時など3Dデータと実際の環境に食い違いが出た場合は走行できなくなる可能性もあります。実際のところ、Googleの自動運転カーが現在走行できるのはアメリカ全土の1%ほどでしかないのです。
搭載されているカメラなどのセンサー類の処理能力にも限界があります。信号機の後ろに太陽が来る強い逆光の場合は認識能力が落ちますし、例えば信号機が故障し警察官が臨時で交通整理をしているなどは、それを信号とすら認識できません。この辺りも、自分で考えることができない「自動運転カー」の限界があります。
また雨・雪などではセンサーの性能が落ちる上、晴天時の運転しかできない自動運転カーではスリップしやすい路面に対応することができません。「運転そのもの」が上手いわけではないのです。
このように、Googleの自動運転カーは自動車自体の技術だけでなく、その周辺にもまだまだ詰めるべき部分がたくさんあり、実現にはほど遠いのです。
とはいえ、Googleは巨額の費用を投じて世界中の地図を作り続けていますし、「Googleナビ」やソーシャルゲーム「Ingress」で街路のデータを取得してもいます。その気になればありとあらゆる道路をGoogleの「自動運転カー」専用レーンにしたりすることもできるでしょう。こうやって否応なしに未来を連れてくるGoogleの力にはいつも驚かされます。
ソース:The Trick That Makes Google’s Self-Driving Cars Work – The Atlantic
Google’s Self-Driving Cars Still Face Many Obstacles | MIT Technology Review

関連記事
「Googleで最も不愉快な仕事」は正社員ではなく契約社員が行っている - DNA
これがGoogle流「ブレインストーミング」のやり方だ - DNA
データの鬼、Googleが解析した「よい上司を製造する8つの条件」 - DNA
GoogleがW杯報道で「明るい方のヘッドライン」を選んだ理由 - DNA
Googleの求人に1週間で7万5千件の応募が殺到し世界記録達成 - DNA
元Googleのエンジニアが語る「なぜGoogleはソーシャルネットワーキングに弱いのか」 - DNA























