

ガレキの上で足元を探りながらバランスをとることができる不整地歩行ロボット「Atlas」のやたら人間くさい動画
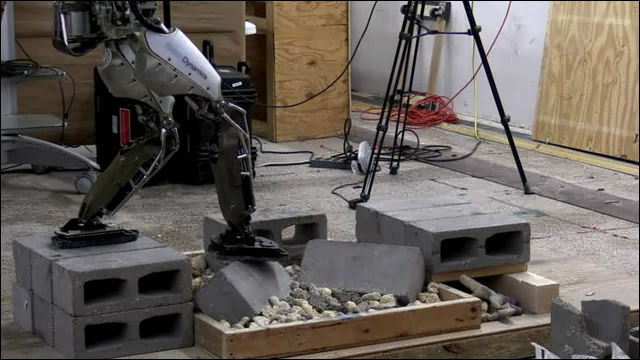
ジャリやガレキの上で歩くときは、1歩ずつ足場がグラグラしないかどうか、足先で確かめて歩くものですが、あのボストン・ダイナミクス社の不整地歩行ロボット「Atlas」は、この動きをそっくりそのままシミュレートしています。
Atlasは災害の現場で作業をすることを目的として開発されているロボット。舗装された平らな道ではなく、ガレキが散乱して不確かな足場の場所でもバランスをとって歩けることを目的としています。
問題は、ロボットは目で見て足場の状態を確認できないこと。足を実際についてからでないと、グラつく場所なのかそうでないのかを知ることはできません。そこでAtlasは実際に足をついたらちょっと足首をぐねぐねさせて体重を移動させ、足場がどのように変化するかを確かめてからステップするようになっています。このため、ものすごく人間くさい動きが実現されました。
ちょっと不安定なところを足場にして蹴り出したときなど「おおっと」という感じで上体でバランスをとるのが、なんとも生々しい。

動画はこちらから。ほんとにものすごく人間っぽいです。
Atlas Walking over Partial Footholds – YouTube
人間の技術はここからかなり遠くまでいったのだなぁ……と思ってしまいますね。
「自動スナック菓子食べさせロボットアーム」が全力でスナックを叩きつけてくる失敗動画 – DNA


関連記事
「鶴の拳」を習得してしまったGoogleの人型ロボット「アトラス(Atlas)」の動画 - DNA
不整地をおっかなびっくり歩くDARPAのAtlasロボットの妙に人間臭い動画 - DNA
「自動スナック菓子食べさせロボットアーム」が全力でスナックを叩きつけてくる失敗動画 - DNA
Boston Dynamics社、頭部を搭載し大幅に小型化された四足歩行ロボット「SpotMini」を公開 - DNA
空中で静止・映像送信が可能な体長わずか16cmのハチドリ型偵察ロボット - DNA
居合術の達人の神業を完全シミュレートしたロボットアームの物凄いパフォーマンス映像「YASKAWA BUSHIDO PROJECT」 - DNA























